太空機器人是一種由人工智能和先進技術所構建的機械設備,專門用于在太空環境中執行各種任務。隨著太空探索的不斷深入和人類對宇宙的日益探索,太空機器人的應用也變得越來越廣泛。太空機器人有著許多獨特的特點和功能。首先,它們經過嚴格的測試和設計,能夠適應太空中的極端環境,例如真空、極端溫度和高輻射。這使得機器人能夠在太空中長時間運行,執行各種任務,為宇航員提供支持。
太空機器人的控制和操作也是一項復雜的工程。由于信號傳輸的延遲和太空環境的極端條件,地球上的操作員需要精確地控制著機器人的行動。為此,專門的遠程遙控系統和虛擬現實技術被廣泛應用,使操作員能夠感受到機器人所處的環境,做出相應的指令。
 太空機器人
太空機器人
太空機器人具有多種功能。它們可以進行維修和維護任務,包括修復太空站外殼的損壞、更換零部件和執行日常維護工作。此外,機器人還可以進行科學研究,收集樣本和數據,探測宇宙中的奧秘。它們還可以用于搜尋和救援行動,幫助尋找失聯的宇航員或損壞的飛行器。
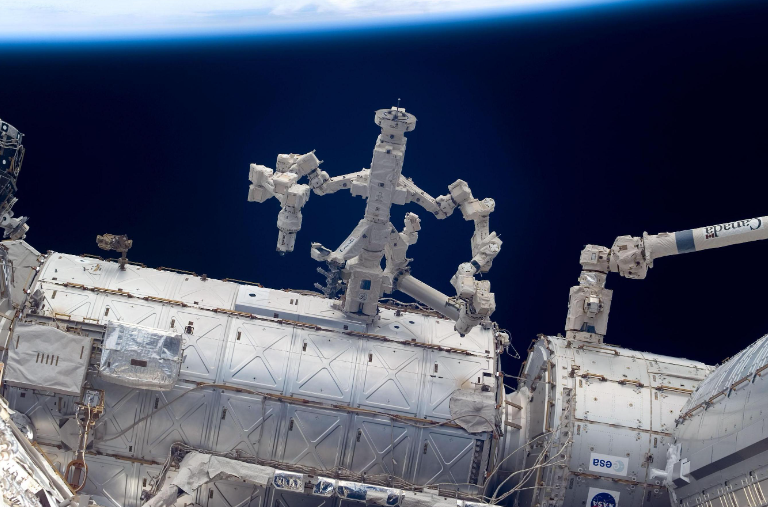
太空機器人,是一種在航天器或空間站上作業的具有智能的通用機械系統。太空機器人具有機械臂和電腦,能實現感知、推理和決策 等功能,可以象人一樣在事先未知的空間環境下完成各種任務。只有操作功能不具備智能的簡單機器人一般稱為機械手。太空機器人工作在微重力、高真空、超低溫、強輻射、照明條件差的空間環境下,它與地面上用的工業機器人有很大差別。在失重條件下物體處于漂浮狀態,給太空機器人操作帶來種種困難。空間視覺識別以及視覺與手爪的配合較地面更困難。太空機器人需要采用三維彩色視覺系統,以便同時確定物體的位置和方向,還要有便于更換的靈巧末端操縱器,利用其接近覺、觸覺、力覺、滑覺傳感器配合視覺系統完成各種操作任務。
1.空間建筑及裝配:一些大型的安裝部件,例如無線電天線、太陽能電池、各個艙段的組裝等艙外活動都離不開空間機器人、機器人將承擔搬運、各構件之間的連接緊固有毒或危險品的處理等任務。在不久的將來人造空間站初期建造一半以上的工作都將由機器人完成。
2.衛星和其他航天器的維護與修理、隨著人類在太空的活動不斷發展。人類在太空的財產也越來越多,其中人造衛星也占了絕大多數。如果這些衛星一旦發生故障,丟棄它們在發射新的衛星就很不經濟,必須設法修理后使他們重新發揮作用。但是如果派宇航員去修理。又牽扯到艙外活動的問題,而且由于航天器處于強烈宇宙輻射的環境之下,人根本無法執行任務,所以只能依靠機器人,空間機器人所進行的維護和修理有回收失靈衛星,對故障衛星進行就地修理。維空間飛行器補給物資等。
3.空間生產和科學試驗宇宙空間為人類提供了地面上無法實現的微重力和高真空環境,利用這一環境可以生產出地面上無法生產或難以生產出的產品。在太空中,還可以進行地面上不能做的科學實驗。和空間裝配、空間修理不同,空間生產和科學試驗主要在艙內環境里進行。操作內容多半是重復性動作。在多數情況下宇航員可以直接檢查與控制。這時候的空間機器人如同工作在地面工廠里的生產線上一樣。因此,可以采用的機器人多是通用型多功能機器人。
主要分類
最簡單的太空機器人,一種由人操縱的多關節機械裝置。它僅起執行機構的作用,需要由人不斷操縱。操作者是控制回路的直接組成部分。由于遠程操作帶來信號傳輸和處理的延時,控制系統可能失穩。早期航天器上的機器人均屬此種類型。1967年美國“觀察者”-Ⅲ航天器上安裝的機械手,在地面操作者控制下,用手爪在月面上完成了挖溝操作并進行了土壤實驗。1976年,美國“海盜”號火星登陸器上安裝的機器人接收地面遙控指令后,啟動一個預先編好的程序,便在指定的表面上著陸,取回火星表層的土樣,并完成挖溝操作。美國航天飛機上安裝的遙控機械手在航天員的遙控操縱下多次成功地釋放衛星入軌,并在軌道上回收了出故障的通信衛星。1986年 2月蘇聯發射的“和平”號空間站上安裝了遙控機械手,它可將對接在軸向對接口上的航天器轉移到側向對接口上,騰出軸向對接口供下次對接時使用。 一種人機混合的遙控系統。它將遙控和一定級別的自主技術相結合。系統有兩個控制回路:本地回路和遠地回路,兩回路之間由遠程通信聯系。工作在低智能和高響應率的遠地回路的太空機器人接到本地回路控制人員的遙控操作指令后,根據自身的敏感器信息和智能,在遠地計算機控制下完成指定操作。操作者則工作在高智能和低響應率的本地回路內,他根據機器人發來的各種信息監控機器人在遠地控制回路內的工作,不時向它發出指令,遠地計算機根據指令控制機器人的操作。操作人員無須直接介入機器人回路,就仿佛身臨現場一樣遙控操作,從而消除了操作者的疲勞感,大大提高工作效率。初期空間站開發中應用的主要就是這種機器人。
不需要人操縱的智能機器人。它具有視覺、聽覺、觸覺等感官功能。機器人接到航天員的命令后(或根據空間站上專家系統的指令),自行規劃、編程、診斷、決策,自主完成裝配、修理或實驗任務。它也可乘坐噴氣背包到遠離空間站的軌道現場執行任務。
機器人已經被應用于醫療、娛樂、國防、公共安全以及太空探索等領域并且技術越發先進。一些機器人完全實現自治,其他則需要人輸入命令。
2011年2月24日,佛羅里達州的肯尼迪航天中心,美國宇航局的類人機器人RobonautR2A向同伴RobonautR2B揮手說“再見”。R2B搭乘“發現”號航天飛機奔赴國際空間站。
發展前景
太空機器人的應用正在不斷擴展。例如,在國際空間站上,機器人被用于協助宇航員進行工作,提供支持和幫助完成復雜的任務。此外,一些國家還計劃將機器人送往月球和其他行星,進行探測和建設工作。這些機器人將成為人類探索宇宙的重要工具,為未來的太空基地和探險任務提供關鍵支持。空機器人的發展也面臨著一些挑戰。首先,太空機器人的成本很高,包括設計、制造、發射和維護等方面的開銷巨大。其次,由于太空環境的極端條件,機器人的可靠性和耐用性也是一個重要的問題。這需要設計師和工程師投入大量時間和精力來確保機器人在極端環境中能夠正常運行,并盡可能延長其使用壽命。